リアルタイム観察下でのマイクロアセンブリに関する研究
土屋 健介生産技術研究所 機械・生体系部門
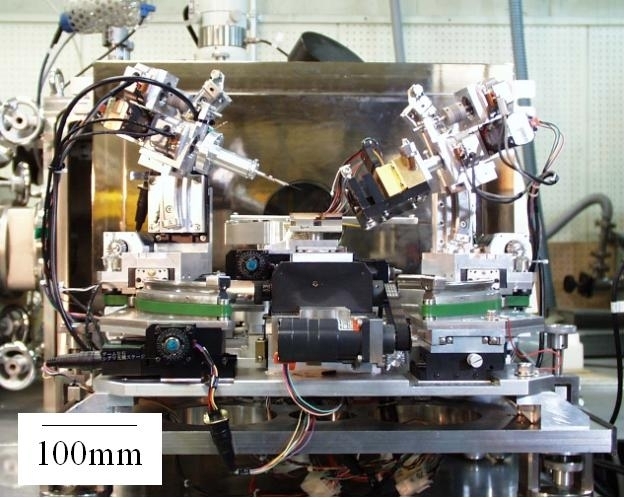
この研究室では、1mm~1μm程度の微細構造物を対象とし、顕微鏡でリアルタイム観察しながら、微細構造物の組立・接合作業を行うシステムを開発している。システムは主に、作業対象を観察する顕微鏡、微細な動きを実現するマニピュレータ、作業に必要な機能を有する工具、作業対象を固定・搬送するパレット、の4要素から構成される。目的とする作業内容や対象物に起因する制約条件を分析し、それらに応じて最適な顕微鏡やマニピュレータを選定し、また種々の機能を持つ工具やパレットを個別に開発してシステムに統合することで、目的とする作業を実現できる。
URL*URLを記入してください。
業種
規模
リアルタイム観察下でのマイクロアセンブリに関する研究
土屋 健介生産技術研究所 機械・生体系部門
この研究室では、1mm~1μm程度の微細構造物を対象とし、顕微鏡でリアルタイム観察しながら、微細構造物の組立・接合作業を行うシステムを開発している。システムは主に、作業対象を観察する顕微鏡、微細な動きを実現するマニピュレータ、作業に必要な機能を有する工具、作業対象を固定・搬送するパレット、の4要素から構成される。目的とする作業内容や対象物に起因する制約条件を分析し、それらに応じて最適な顕微鏡やマニピュレータを選定し、また種々の機能を持つ工具やパレットを個別に開発してシステムに統合することで、目的とする作業を実現できる。
お問い合わせ内容*
お問い合わせ内容を記入してください。
お問い合わせ内容は500文字以内で記入してください。
問い合わせ由来*問い合わせ由来を選択してください。