3Dナビゲーションによる診断・手術支援システムの構築
カテゴリー
- 医学・薬学
- 機械
- 情報・通信
SDGs











研究内容
近年、消化器外科手術においては鏡視下手術およびロボット支援下手術などが導入され、その拡大視効果に伴う精緻な手術操作とともに低侵襲な手術が可能となってきており、先進施設を中心にして急速に普及してきている。また血管外科領域においてはAAAに対するステント手術といった低侵襲手術も同様に広く普及してきている。これらの手術が今後はより多くの施設で導入され、中心的な治療法となっていることが予想される。その際、これらの手術を一般の外科医が、より安全に、より確実に施行することが必要になってくるが、そのための手段として3D画像ナビゲーションによる診断・手術支援システムの構築は重要な位置を占めていると考えられる。
脳外科、整形外科、肝臓外科分野を中心に現在3D画像ナビゲーションの臨床応用が実用化されつつあるが、消化管手術、血管外科手術において術中3D画像ナビゲーションでの手術支援はまだ臨床応用されてはいない。この研究室(教授 渡邉聡明)では3D画像ナビゲーションを用いた診断・手術支援システムの構築を多方面から検討し、開発することを目的として研究を進めている。例えば、術前に得られたCT、MRI、PETなどの情報を元に腫瘍、血管等の位置関係を3D情報として再構築し、術中使用する3Dモニター上に表示する、更には、それを、患者の体位や体型を認識した上で、3Dモニター上の手術操作画面に重ね合わせリアルタイムに表示することで術中ナビゲーションを行うことを目指す。このプロジェクトの実現により、リアルタイムな個別の局所解剖認識に基づいた、安全かつ、的確で効率的な手術が可能となる。工学部とも連携のうえで、上記システムの構築を目指している。

上腸間膜動脈の郭清シミュレーション
© 渡邉聡明 清松知充
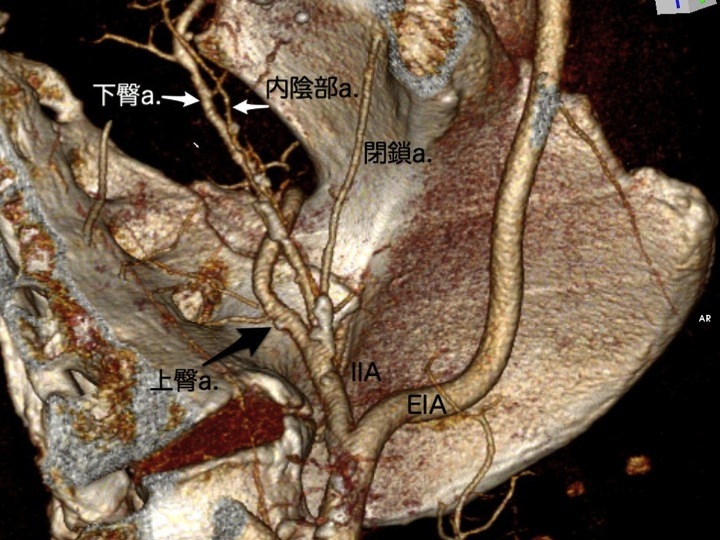
内腸骨動脈系の郭清シミュレーション
© 渡邉聡明 清松知充
想定される応用
今後は消化器外科領域、血管外科領域にとどまらず、あらゆる外科領域に応用の可能な技術であり広い市場規模を有する技術になりうるものと考えられる。
連携への希望
今回この研究室では、3Dナビゲーションによる診断・手術支援システムの構築を目標とした研究開発に興味を持つ企業との共同研究を希望している。
公開日 / 更新日
- 2021年12月25日
識別番号
- No. 00237-01