大規模搬送システムの統合的設計
カテゴリー
- 機械
- 情報・通信
SDGs










研究内容
工場、配送センター、倉庫等の環境において物流作業を司る搬送システム設計を目指した研究を進めている。具体的には、搬送機としての無人搬送車(Automated Guided Vehicle, AGV)やフォークリフト、クレーン等の行動則設計、台数設計等が研究課題となる。解導出に際して、この研究室が提案する設計法(動作計画理論とネットワーク最適化理論、共進化的計算を組み合わせた方法)はこれらの問題への対応に有効であり、これを実際の物流設計に役立てたいと考えている。
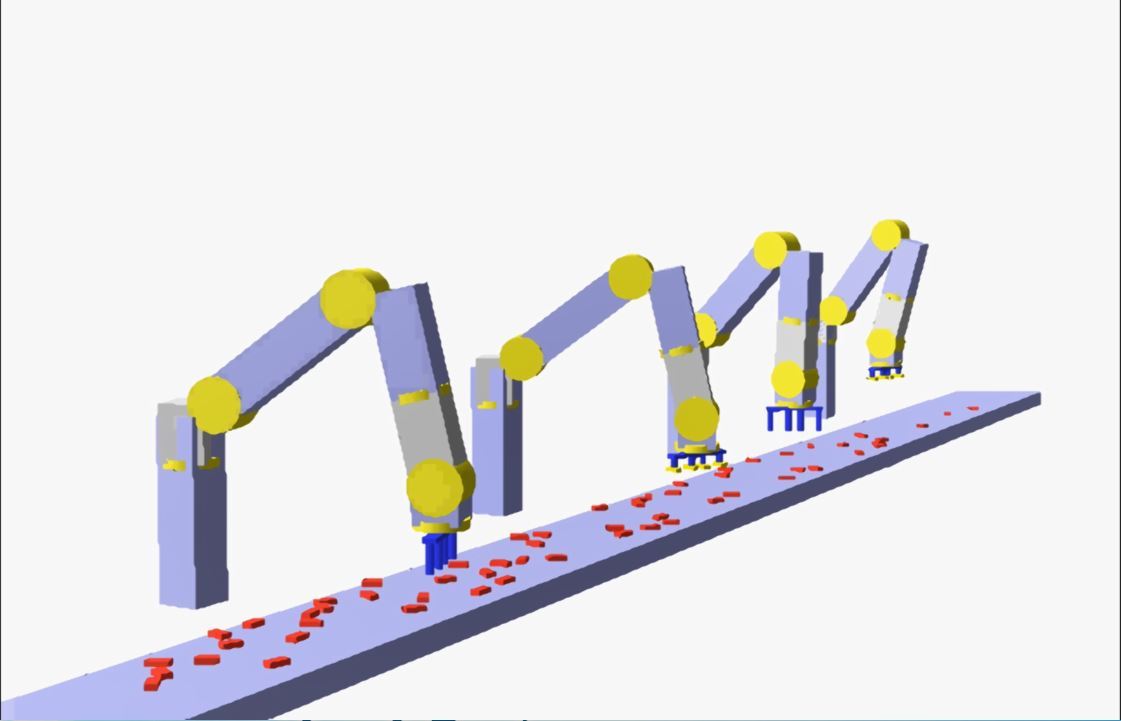
ロボット物流システムの一例:
複数ロボットによるピックアンドプレース
© 太田順
搬送システムの一例:
自動倉庫におけるスタッカクレーンの制御
© 太田順
想定される応用
物流現場におけるシステム制御則の提案
連携への希望
この研究に関心を持つ企業との共同研究を希望している。
公開日 / 更新日
- 2021年12月23日
識別番号
- No. 00194-01