太田 順教授
大学院工学系研究科 附属人工物工学研究センター
SDGs










連携提案
我々は従来から群知能ロボットの研究を通じて,「ある空間に滞在し,動作している人間」、「人間を支援する知的エージェントとしてのロボット」、「ロボットと人間が相互作用する環境」の三者から構成される系を考えてきた。動作計画手法、進化的計算、最適化工学,制御工学等を理論的基盤として、ロボット工学、サービス工学、生産システム工学に関する研究プロジェクトを遂行している。
現在は「マルチエージェントロボット」「大規模生産/搬送システム設計と支援」「身体性システム科学,人の解析と人へのサービス」という3つの分野において研究を行っており、研究成果の応用・事業化について関心のある企業との共同研究を希望している。
事業化プロポーザル
-
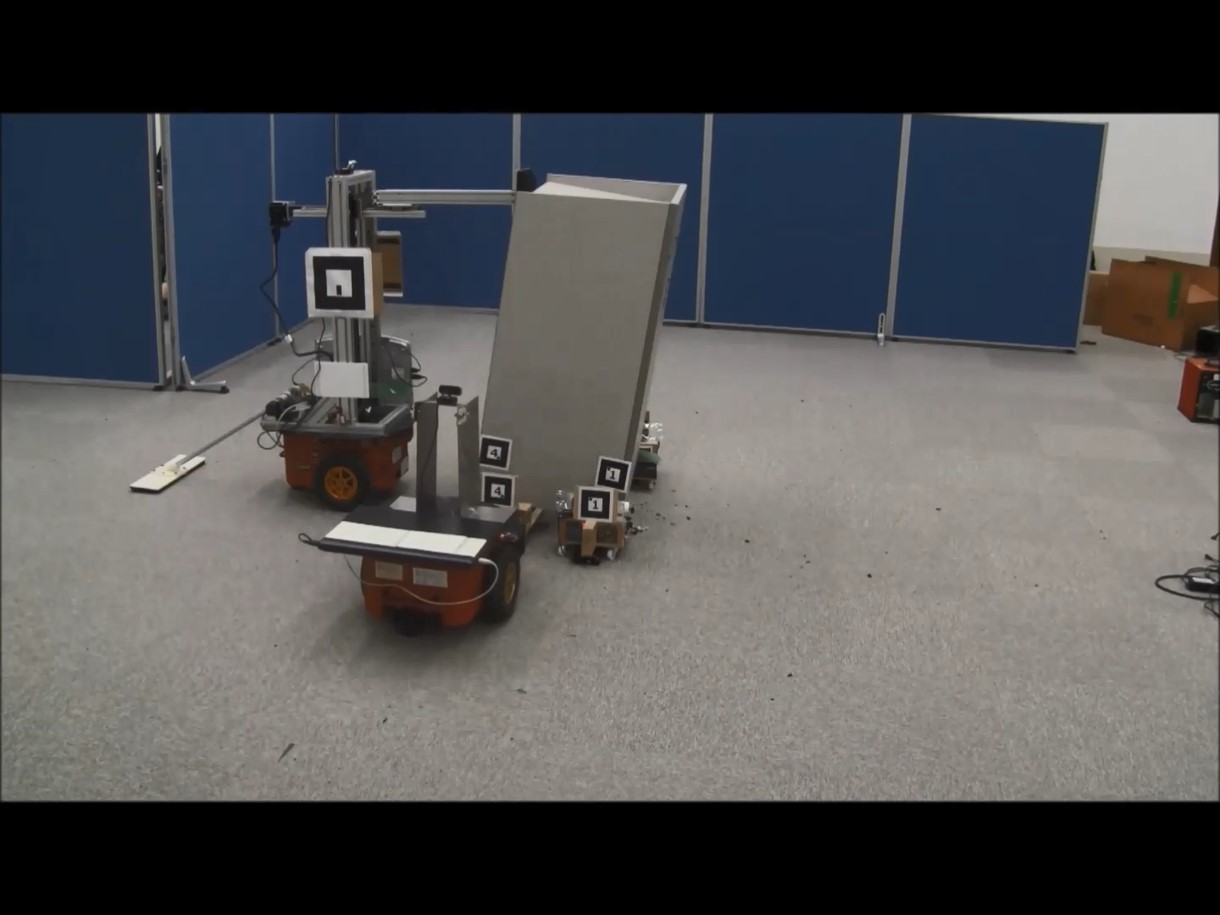
 大規模搬送システムの統合的設計工場、配送センター、倉庫等の環境において物流作業を司る搬送システム設計を目指した研究を進めている。具体的には、搬送機としての無人搬送車(Automated Guided Vehicle, AGV)やフォークリフト、クレーン等の行動則設計、台数設計等が研究課題となる。解導出に際して、この研究室が提案する設計法(動作計画理論とネットワーク最適化理論、共進化的計算を組み合わせた方法)はこれらの問題への対応に有効であり、これを実際の物流設計に役立てたいと考えている。
大規模搬送システムの統合的設計工場、配送センター、倉庫等の環境において物流作業を司る搬送システム設計を目指した研究を進めている。具体的には、搬送機としての無人搬送車(Automated Guided Vehicle, AGV)やフォークリフト、クレーン等の行動則設計、台数設計等が研究課題となる。解導出に際して、この研究室が提案する設計法(動作計画理論とネットワーク最適化理論、共進化的計算を組み合わせた方法)はこれらの問題への対応に有効であり、これを実際の物流設計に役立てたいと考えている。 -
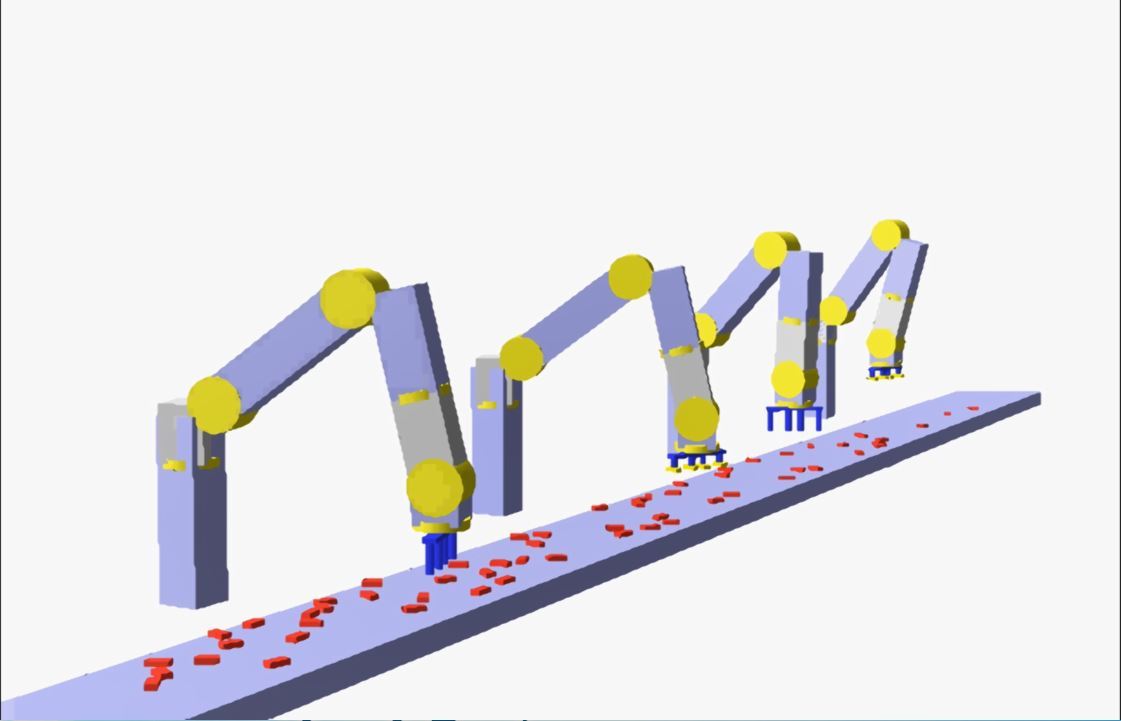
 ロボットの行動制御・教示の簡易化技術の共同開発マニピュレータ・移動ロボット等各種ロボットの行動制御(機種選定,配置設計,作業手順生成,軌道生成など)を簡易に行える技術を開発して、例えば組立等の作業を行なう既存の生産ラインに各種のロボットを円滑に導入可能な設計論の構築を目指して研究を進めている。当研究室では当該分野についていくつかの研究の蓄積がなされている。
ロボットの行動制御・教示の簡易化技術の共同開発マニピュレータ・移動ロボット等各種ロボットの行動制御(機種選定,配置設計,作業手順生成,軌道生成など)を簡易に行える技術を開発して、例えば組立等の作業を行なう既存の生産ラインに各種のロボットを円滑に導入可能な設計論の構築を目指して研究を進めている。当研究室では当該分野についていくつかの研究の蓄積がなされている。 -
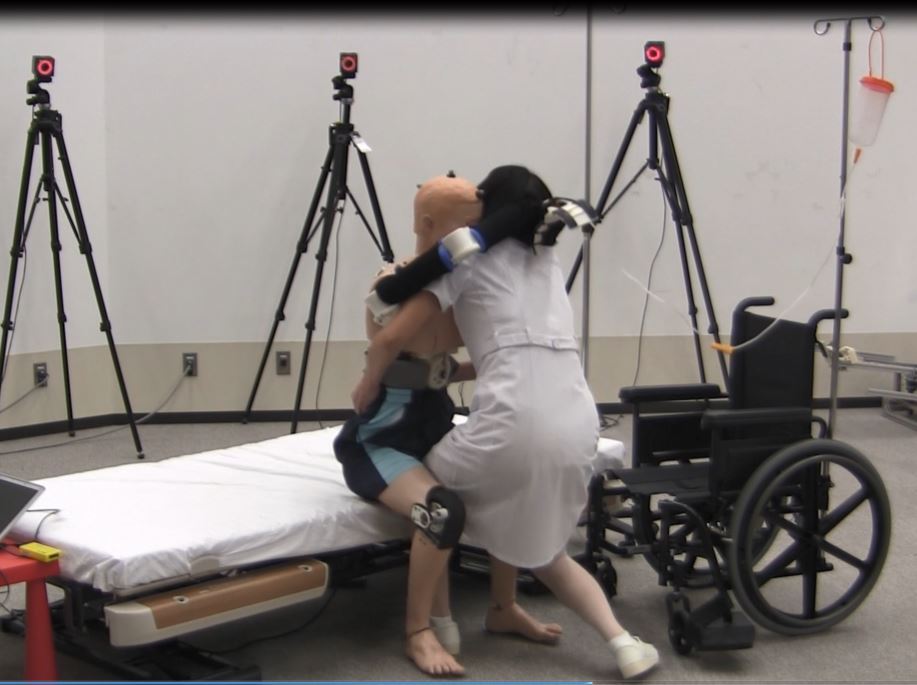 作業者の行動認識と支援多様な業務を同時並行的に行う人の行動を、何らかのセンサ系で認識し、その行動遂行を円滑にするべく支援する研究を行っている。例えば、製造工程、看護師、介護職、管理業務に従事している人等々が、各瞬間においてどの業務を遂行していて、全体としての業務進捗状況がどうなっているか、今後どのような手順で業務遂行するべきかについて、センシング技術やスケジューリング技術を用いて支援する方法論の提案ならびにシステム構築を行う予定である。
作業者の行動認識と支援多様な業務を同時並行的に行う人の行動を、何らかのセンサ系で認識し、その行動遂行を円滑にするべく支援する研究を行っている。例えば、製造工程、看護師、介護職、管理業務に従事している人等々が、各瞬間においてどの業務を遂行していて、全体としての業務進捗状況がどうなっているか、今後どのような手順で業務遂行するべきかについて、センシング技術やスケジューリング技術を用いて支援する方法論の提案ならびにシステム構築を行う予定である。