ロボットの行動制御・教示の簡易化技術の共同開発
カテゴリー
- 機械
- 情報・通信
SDGs










研究内容
マニピュレータ・移動ロボット等各種ロボットの行動制御(機種選定,配置設計,作業手順生成,軌道生成など)を簡易に行える技術を開発して、例えば組立等の作業を行なう既存の生産ラインに各種のロボットを円滑に導入可能な設計論の構築を目指して研究を進めている。当研究室では当該分野についていくつかの研究の蓄積がなされている。
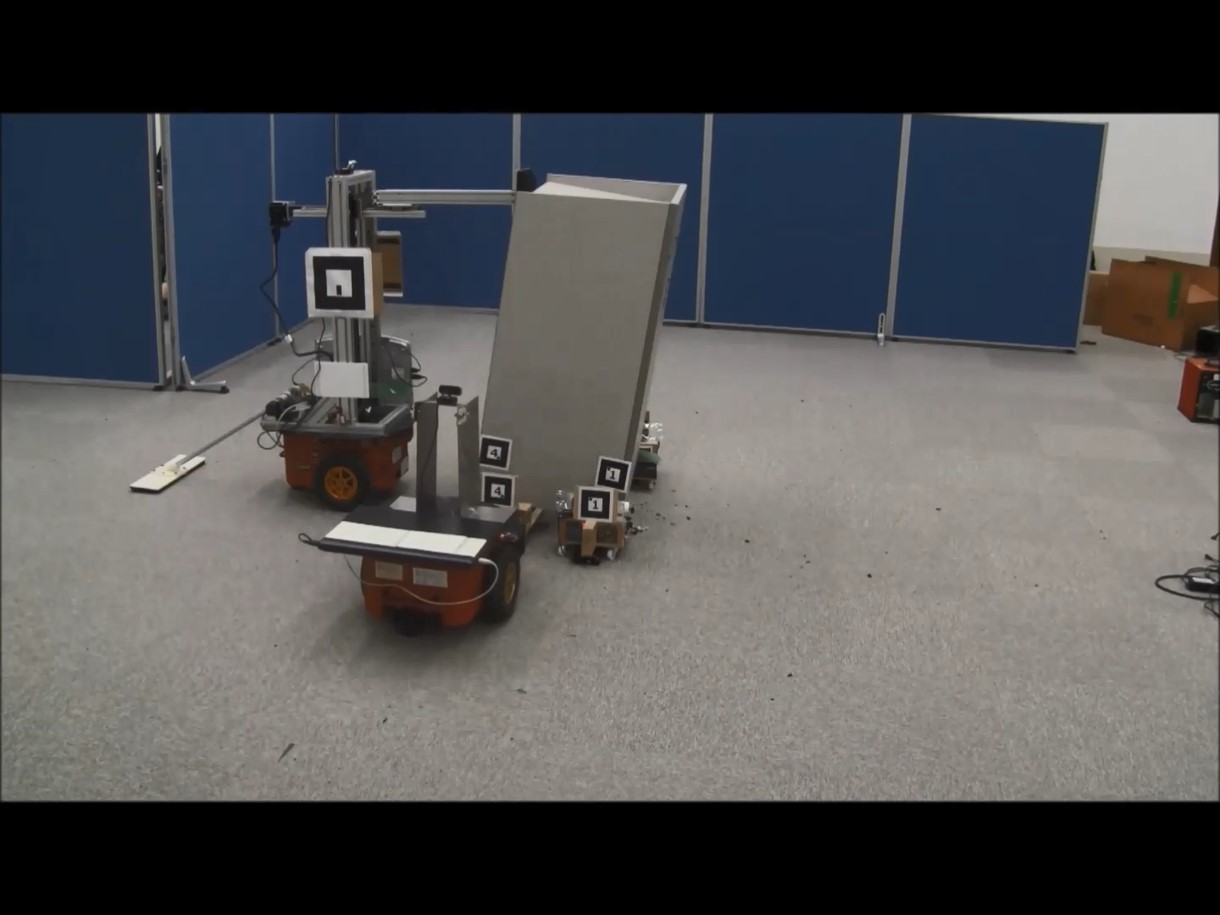
ロボット行動制御の一例:
道具を用いた移動ロボットの協調
© 太田順

ロボット教示の一例:
複数ロボットへの教示システム
© 太田順
連携への希望
この技術の応用に関して、ロボットメーカーや生産現場でロボットを使用する企業等との共同研究を希望している。
公開日 / 更新日
- 2021年12月23日
識別番号
- No. 00194-02