遠隔操作ロボットのヒューマンインタフェース
カテゴリー
- 機械
- 情報・通信
- エレクトロニクス
SDGs










研究内容
移動ロボットを遠隔操作する際、ロボットに搭載された複数のカメラの情報を効率的にオペレータに提示することが重要である。そこで当研究室では、ロボットに取り付けた複数台のカメラで映像に対してリアルタイム画像処理を施し、あたかもロボットを真上から見たような別視点映像を生成し、オペレータに提示する技術を開発した。
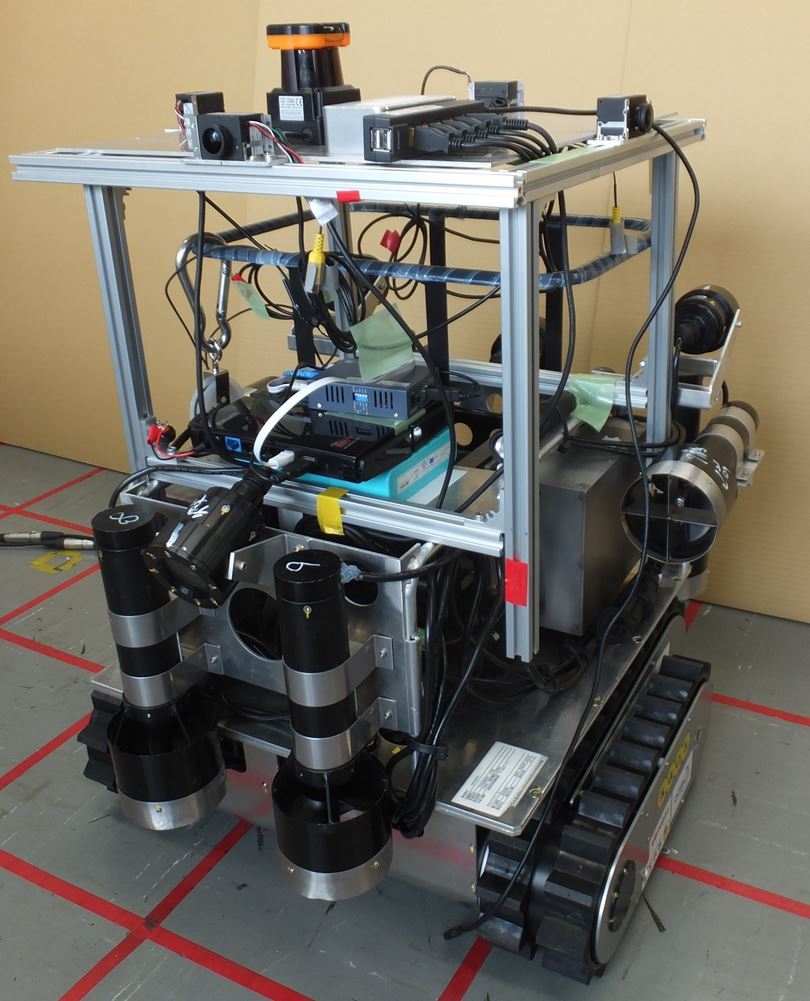
開発した遠隔操作ロボット。
複数のセンサを搭載し、無線での遠隔操作が可能である。
© 山下研究室

ロボットの遠隔操作。
(a) 開発したヒューマンインタフェース。
© 山下研究室

ロボットの遠隔操作。
(b) 画像処理前の4台のカメラ映像。
© 山下研究室
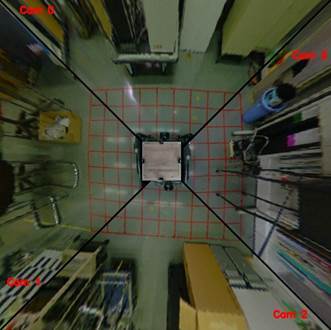
ロボットの遠隔操作。
(c) 画像処理後の別視点映像。
© 山下研究室
想定される応用
本研究成果の一部は、極限環境における作業ロボットなどに既に活用されており、実利用が可能な内容である。
連携への希望
このような研究に関心のある企業・団体との連携を希望する。
関連情報
詳細については下記のサイトを参照のこと。
http://www.robot.t.u-tokyo.ac.jp/yamalab/
公開日 / 更新日
- 2021年12月23日
識別番号
- No. 00215-01