山下 淳教授
大学院新領域創成科学研究科 人間環境学専攻
SDGs










連携提案
本研究室では「センサ情報処理ロボットの眼で世界を知る」ことを目指し、人間の目の働きをコンピュータで実現する画像処理技術やセンサ情報処理技術を中心として、ロボット、マルチメディア、ヒューマンインタフェース、セキュリティ、外観検査など基礎理論から実応用まで幅広く取り組んでいる。
現在以下のような研究テーマに取り組んでおり、応用・実用化に関心のある企業との連携を希望する。
研究テーマ
自律移動ロボットによる環境センシング
劣化画像の情報復元と画像理解
ウェアラブル福祉ヒューマンインタフェース
ステレオカメラを用いた三次元計測
複数センサ情報の融合による知的センシング
自律移動ロボットの行動計画
群ロボットによる協調作業
事業化プロポーザル
-
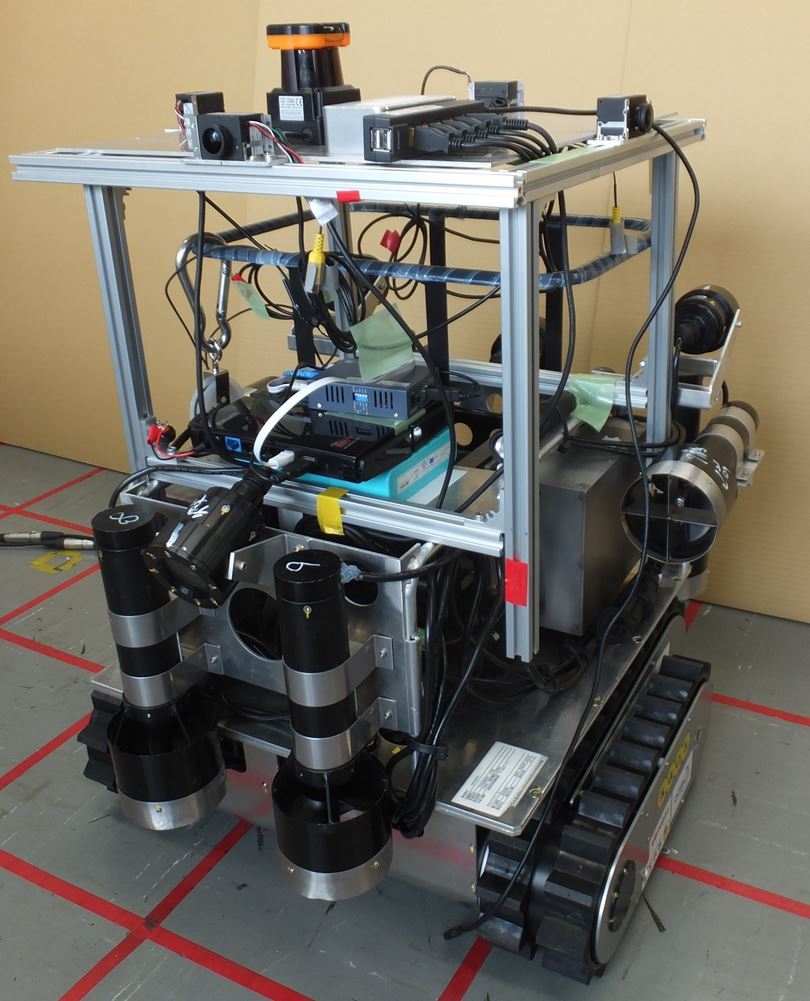 遠隔操作ロボットのヒューマンインタフェース移動ロボットを遠隔操作する際、ロボットに搭載された複数のカメラの情報を効率的にオペレータに提示することが重要である。そこで当研究室では、ロボットに取り付けた複数台のカメラで映像に対してリアルタイム画像処理を施し、あたかもロボットを真上から見たような別視点映像を生成し、オペレータに提示する技術を開発した。
遠隔操作ロボットのヒューマンインタフェース移動ロボットを遠隔操作する際、ロボットに搭載された複数のカメラの情報を効率的にオペレータに提示することが重要である。そこで当研究室では、ロボットに取り付けた複数台のカメラで映像に対してリアルタイム画像処理を施し、あたかもロボットを真上から見たような別視点映像を生成し、オペレータに提示する技術を開発した。 -
 人間-ロボット共存環境における案内ロボット当研究室では、人間とロボットが共存する環境において、人間を目的地まで案内する移動ロボットの研究開発を行っている。 案内ロボットは、人間の邪魔にならないように行動すること、すなわち、人間の意図を推定することが重要である。そこで、人間の行動をリアルに再現するモデルを構築し、歩行者の行動を忠実にシミュレーションできる手法を構築した。
人間-ロボット共存環境における案内ロボット当研究室では、人間とロボットが共存する環境において、人間を目的地まで案内する移動ロボットの研究開発を行っている。 案内ロボットは、人間の邪魔にならないように行動すること、すなわち、人間の意図を推定することが重要である。そこで、人間の行動をリアルに再現するモデルを構築し、歩行者の行動を忠実にシミュレーションできる手法を構築した。