力覚提示技術を用いた非接触物体搬送ツール
カテゴリー
- バイオテクノロジー
- 医学・薬学
- 機械
- 情報・通信
- エレクトロニクス
SDGs











研究内容
力覚提示技術と非接触浮上技術の統合により、精密パーツ、易損物などを非接触で手軽に搬送できるツールの実現をめざして研究を進めている。
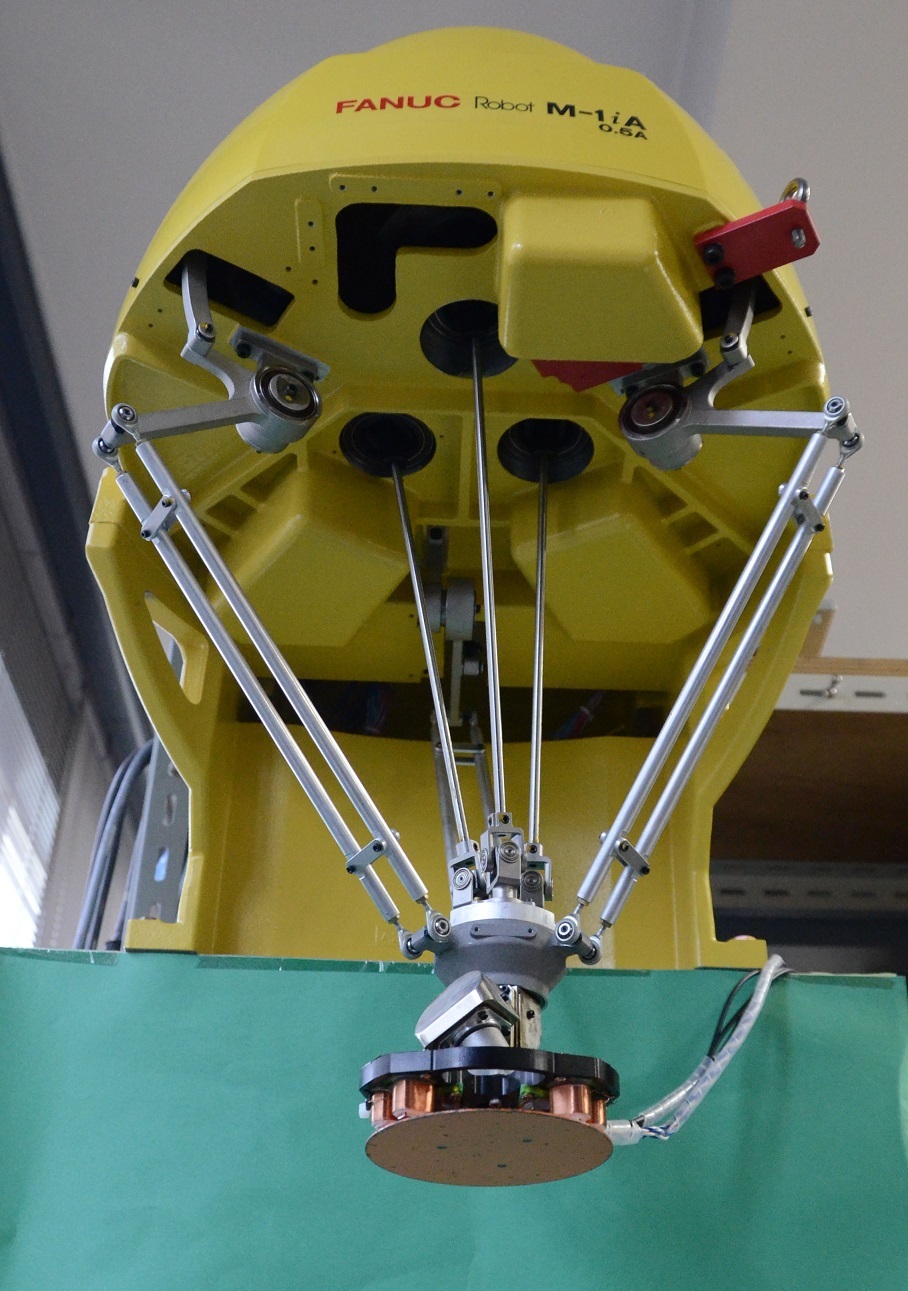
産業用パラレルリンクロボットと非接触浮上技術の組み合わせによる高速ディスク搬送
© 山本研究室
想定される応用
例えば、シリコンウェハや、マイクロパーツなどのように、接触を伴うハンドリングを避けたい対象物に対して適用することをめざしている。また、同様の非接触浮上技術を産業用ロボットと組み合わせることで、物体を高速に非接触搬送する技術についても研究を行っている。
連携への希望
このような研究に興味を持つ企業との共同研究が可能である。
公開日 / 更新日
- 2021年12月24日
識別番号
- No. 00230-01