山本 晃生教授
大学院新領域創成科学研究科 人間環境学専攻
SDGs











連携提案
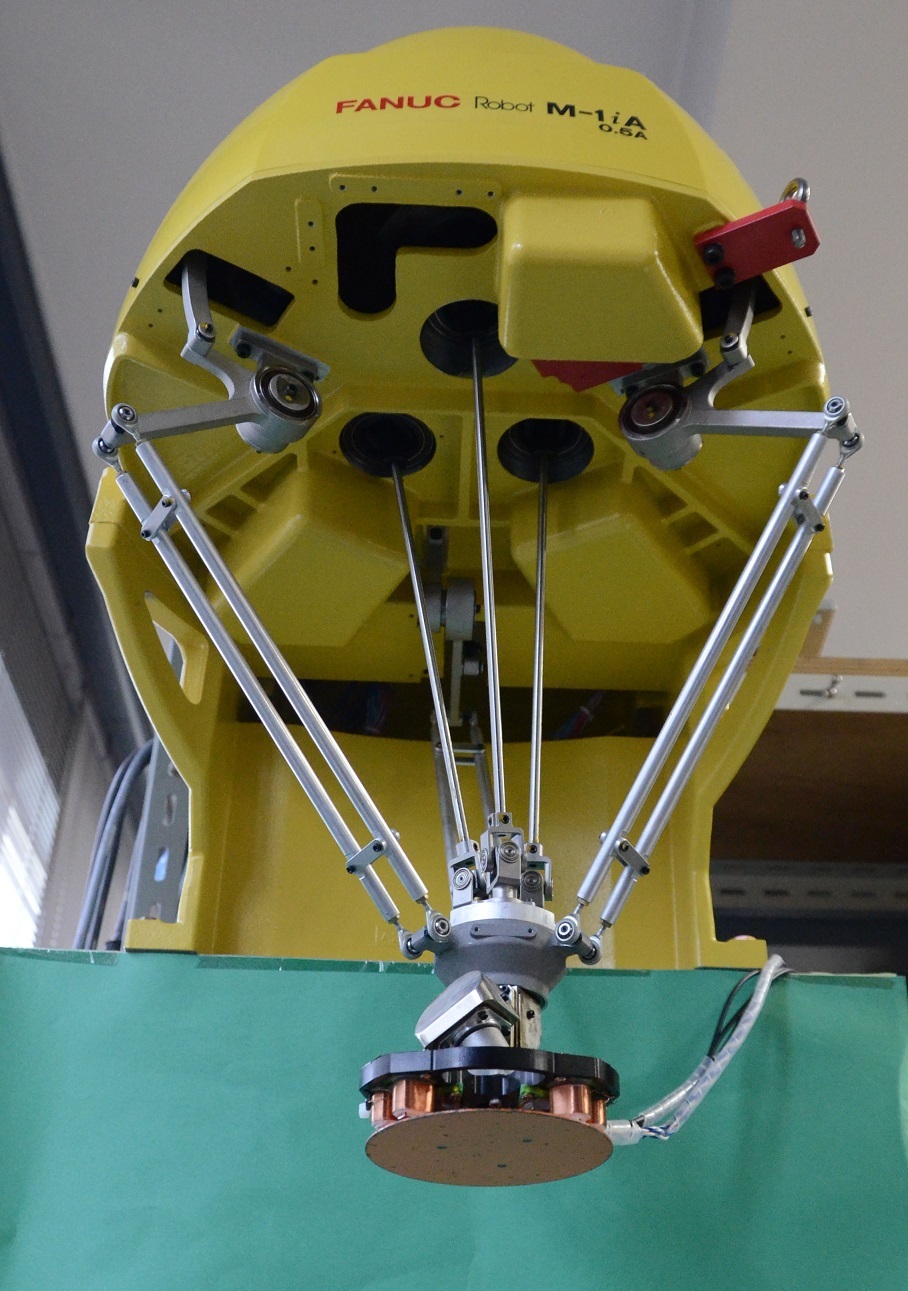
アクチュエータや物体のハンドリングを中心に「ものを動かす」ためのロボティクス・メカトロニクス技術を研究している。また、それらの技術をインタラクション分野に応用することで、「動き」を伴う革新的なヒューマンインタフェースの実現に取り組んでいる。
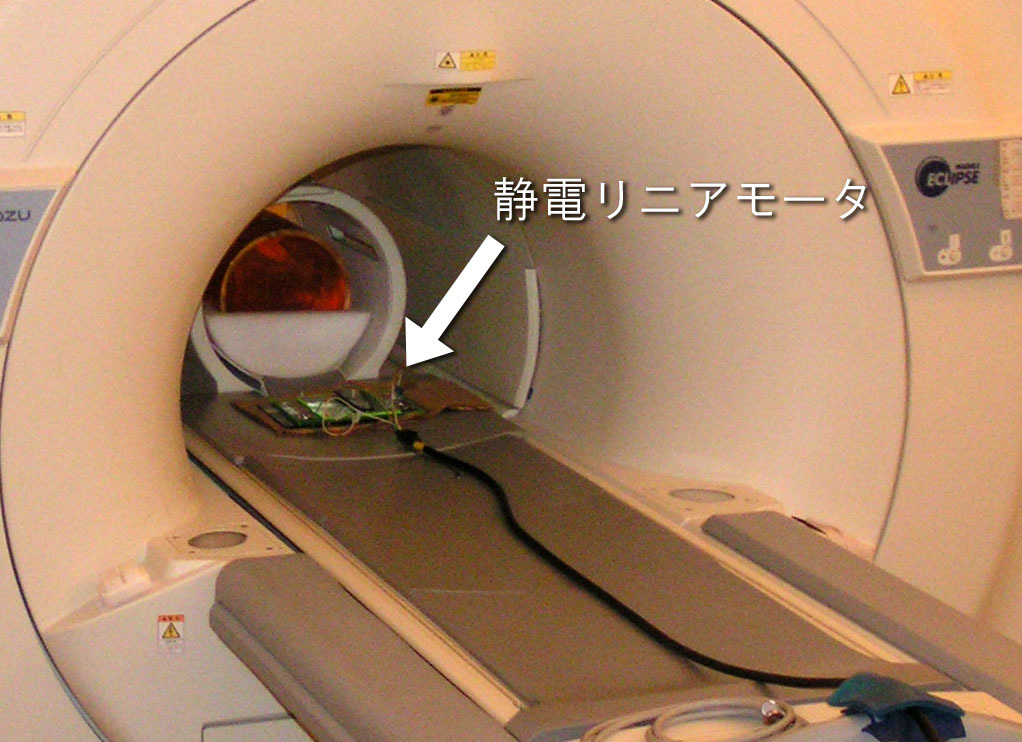
・静電力を活用したアクチュエーション技術
・バーチャルな手触りを再現する触力覚提示技術
・環境駆動型ロボティクス
これらの研究に興味を持つ企業との共同研究を希望する。