リアルタイム観察下でのマイクロアセンブリに関する研究
カテゴリー
- バイオテクノロジー
- 医学・薬学
- 素材
- 機械
SDGs











研究内容
この研究室では、1mm~1μm程度の微細構造物を対象とし、顕微鏡でリアルタイム観察しながら、微細構造物の組立・接合作業を行うシステムを開発している。システムは主に、作業対象を観察する顕微鏡、微細な動きを実現するマニピュレータ、作業に必要な機能を有する工具、作業対象を固定・搬送するパレット、の4要素から構成される。目的とする作業内容や対象物に起因する制約条件を分析し、それらに応じて最適な顕微鏡やマニピュレータを選定し、また種々の機能を持つ工具やパレットを個別に開発してシステムに統合することで、目的とする作業を実現できる。
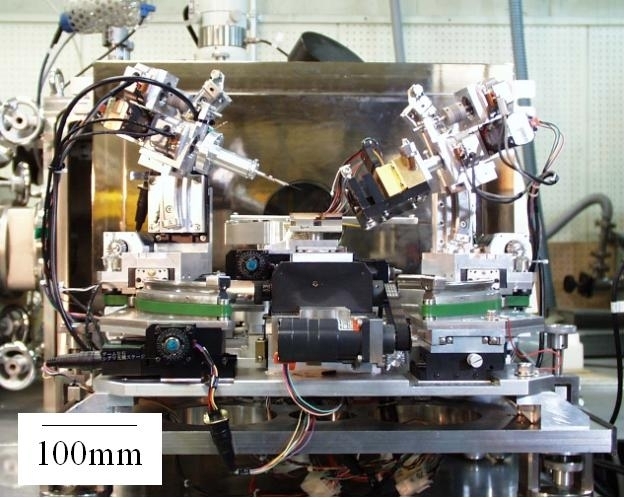
電子顕微鏡下で組立作業を行うための集動マニピュレータ。合計16自由度を有し、回転中心はすべて工具先端に集中している。
© 土屋 健介
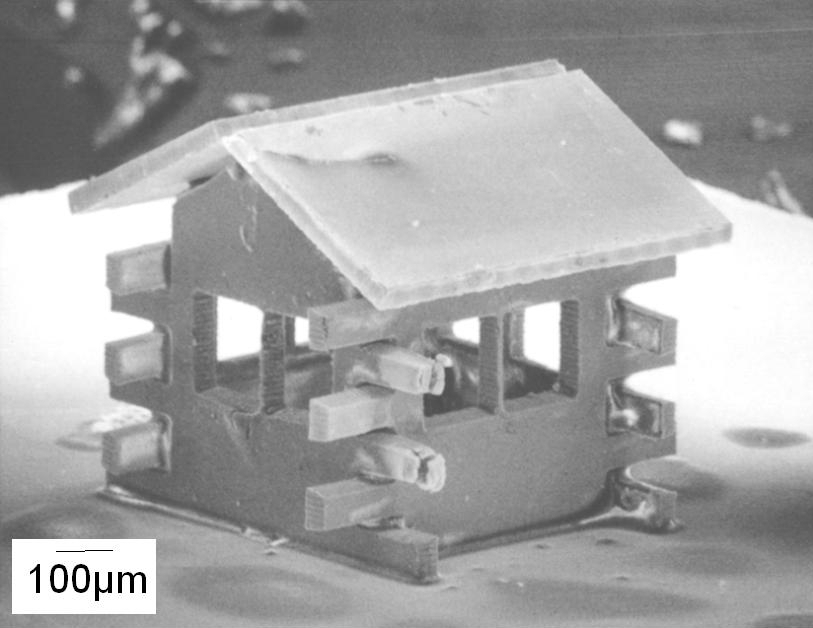
試作したアセンブリシステムのデモンストレーションとして、多数の部品を組立・接合して製作した1mmのマイクロハウスの電子顕微鏡像。
© 土屋 健介
想定される応用
これまでに、2台の電子顕微鏡で2方向から観察し、合計16自由度を有し工具先端を中心に動く集動マニピュレータで任意の作業を行うアセンブリシステムを試作したが、たとえばそのマニピュレータ先端には静電気で微細構造物を捕捉・離脱する静電吸着工具や、レーザで接着剤粉末を溶融させる接合工具を新たに開発して取り付け、1mm程度の構造物の組み立て作業などを実現してきた。
その他にも、細胞への試薬の注入工具や微小液滴(1ピコリットル)を分注するマイクロディスペンサなども試作しており、広範囲にわたる応用が可能であると考えている。
連携への希望
この技術の実用化に関心のある企業からの相談に応じる用意がある。
公開日 / 更新日
- 2023年04月11日
識別番号
- No. 00263-02