SDGs











連携提案
多くのロボットは人間を目標として開発されてきた。本来、機械システムであるロボットは人間を超える可能性を有しており、その人間を超えるロボットとして速度面に焦点を当てて、高速なロボットの開発とその応用を行っている。加えて、ロボットの眼となる画像処理認識を含むビジョンシステムも重要であり、特に、高速にロボットを制御するためには高速画像処理技術が必須となるため、その技術と高速視覚フィードバック制御技術を提案している。
高速ビジョンを中心として各種センサをネットワーク上に接続し、 センサネットワークシステムを構築することにより実世界を高速かつ包括的に認識するとともに、 アクチュエーションシステム(ロボット等)へとリアルタイムにフィードバックし,、実世界との動的なインタラクション(相互作用)を実現する高速知能システムの開発を目指している。
現在は、次のような領域で研究開発を進めている。
- 物体マニピュレーション
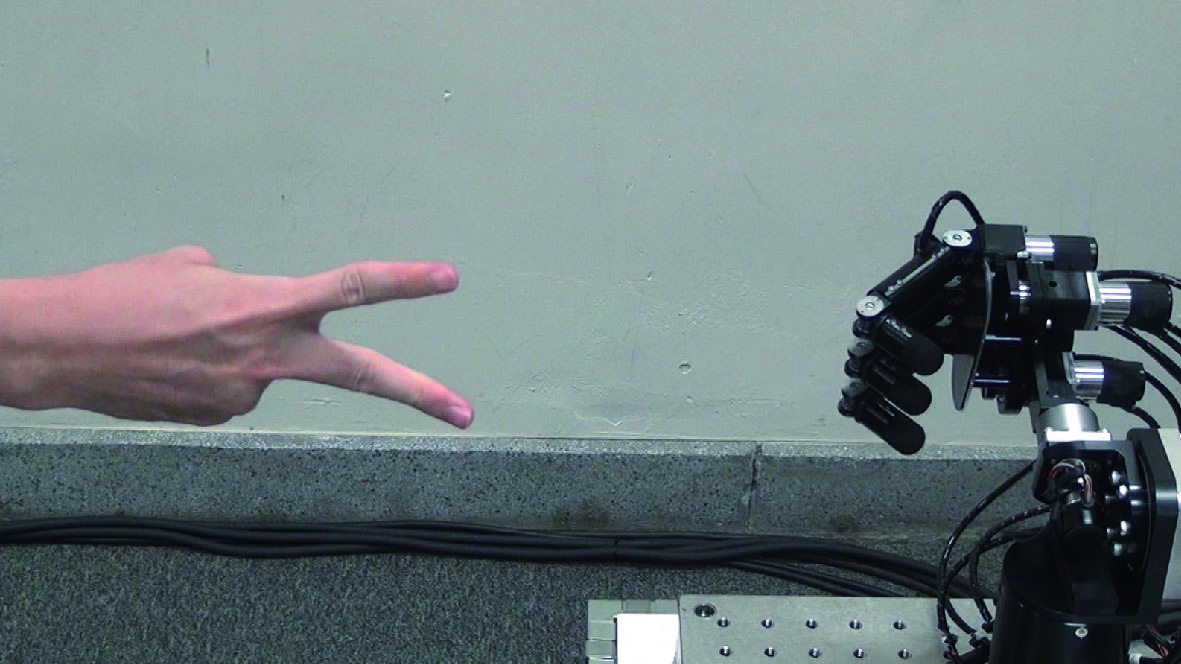
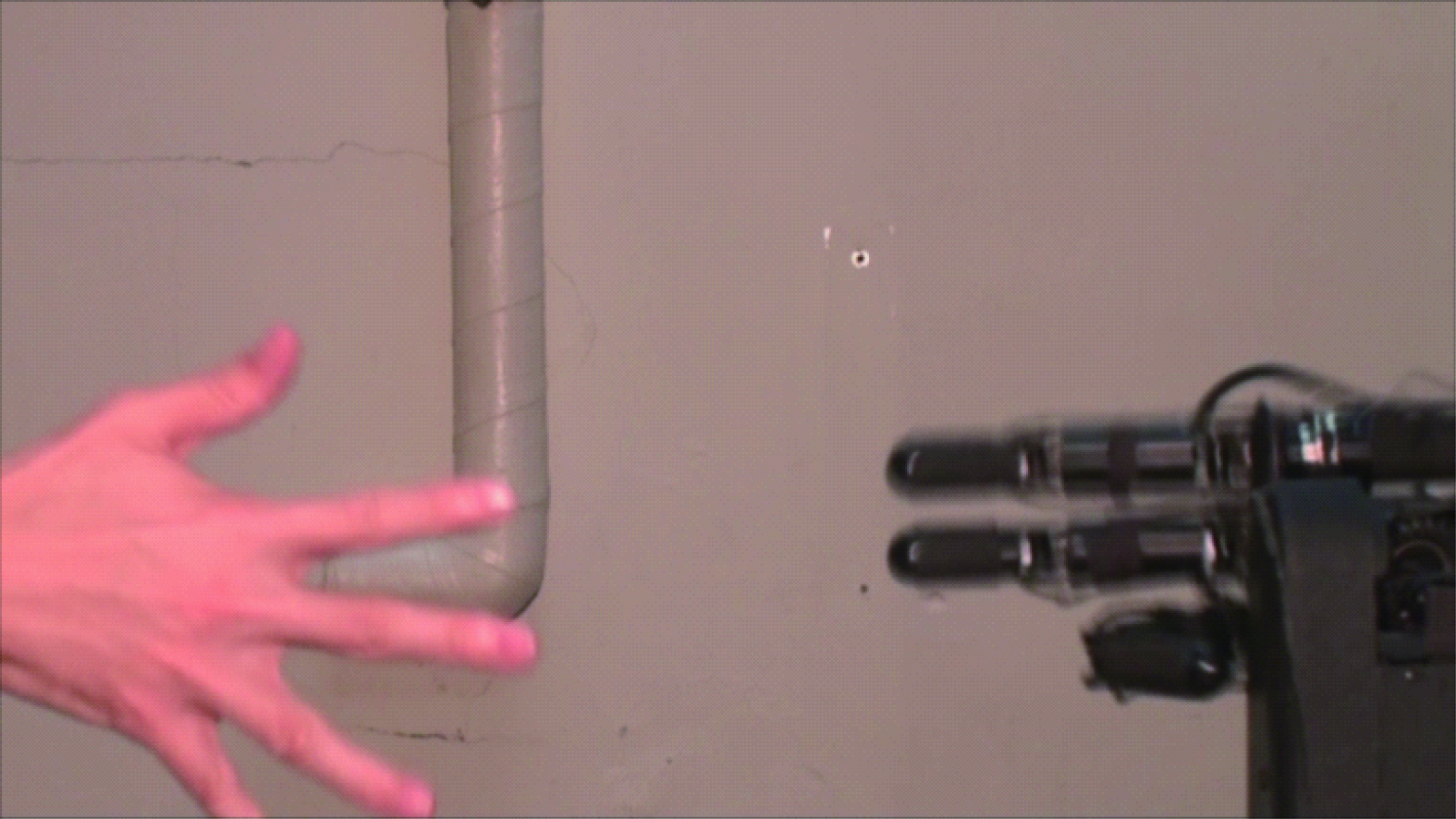
- 人間ロボット協調
- 高速センサネットワークシステムとその応用
- 産業用ロボットの高機能化
- 移動ロボット
- 高速ハンド・アームシステム
- ITS応用
これらの研究の応用・実用化に関心のある企業との連携を希望する。
勝率100%じゃんけんロボット
© 山川 雄司
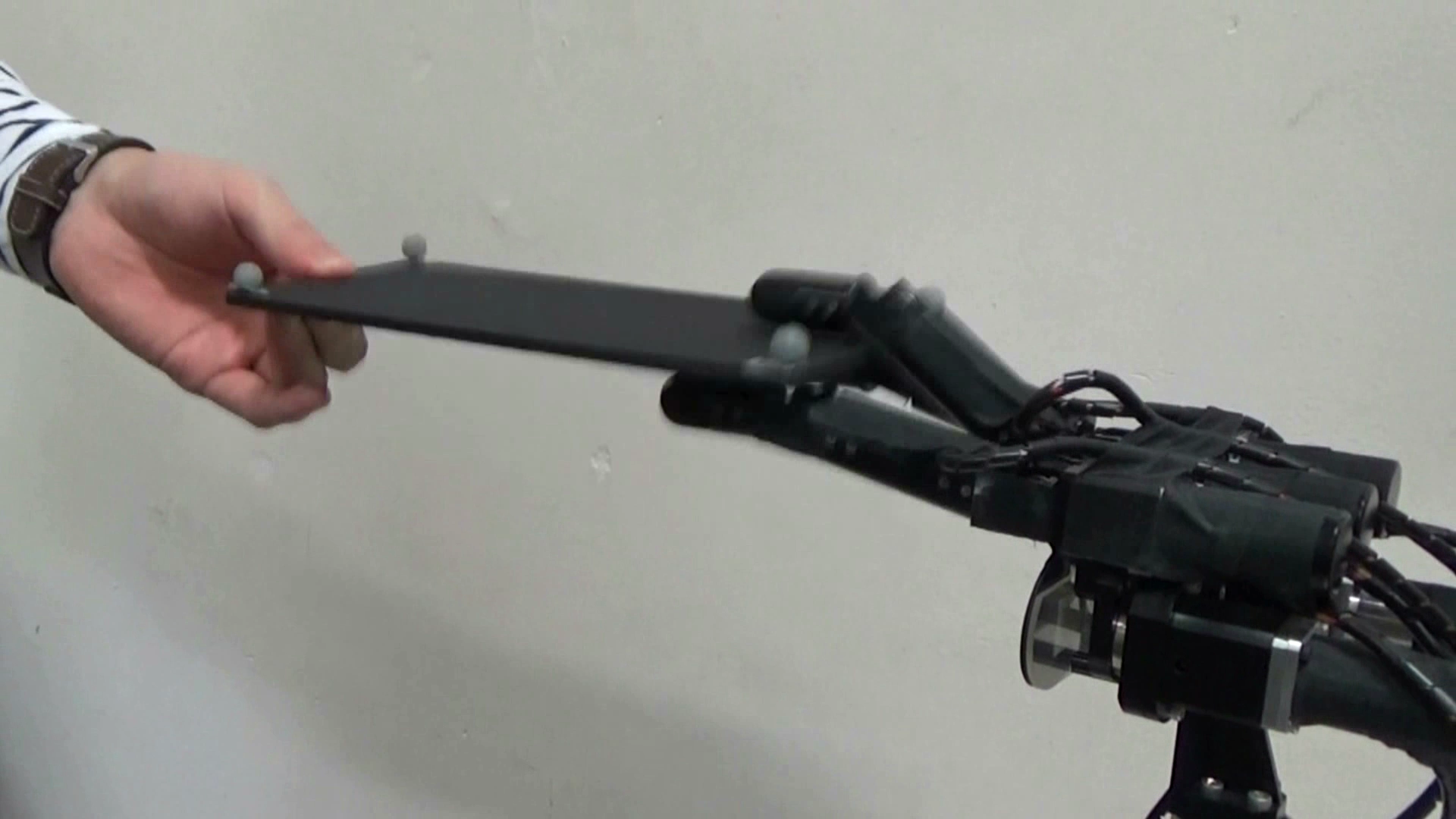
人間ロボット協調

高速動的マニピュレーション

高速ビジョンネットワークとITS応用