高速ビジョンと高速ロボットによる人間と機械の協調
カテゴリー
- 機械
- 情報・通信
- エレクトロニクス
SDGs











研究内容
近年では産業界だけでなく人間社会にもロボットが導入されつつある。人間とロボットとが共存・共生・協働するためには、人間とロボットが相互に作用しあう人間機械協調システムが必要である。これまでの人間機械協調システムは、ロボット自体の動きや画像処理認識が低速のため、ロボットが人間に協調するのではなく、人間がロボットや機械に協調する形となっていた。このような問題を解決するには、高速ビジョン、高速画像処理、高速ロボットを導入することがシンプルかつ効果的である。
この研究室では人間とシステムが相互作用する場面において「システムが人間の視覚認識速度よりも高速に認識・行動し、人間が認識できない遅延レベルと高速サンプリングレートで人間とシステムとの相互作用を実現する」ことを目指している。その一環として、高速ビジョンと高速ロボットハンドを用いて,人間の動作に完全対応可能な人間機械協調システムを開発している。具体的な例として、勝率100 % じゃんけんロボットを開発し、この研究成果は動画投稿サイトにおいて、500万回以上の再生回数に達し、世界中で注目されている技術である。本技術は、人間の動作に合わせたロボットハンドのミリ秒オーダでの協調制御の可能性を示した一例であり、遅延なしの人間の動作支援や人間との協調作業などに応用展開されると期待できる。実際に、人間との協調動作・人間の作業支援・人間の運動機能拡張等の様々な具体的タスクを実現している。
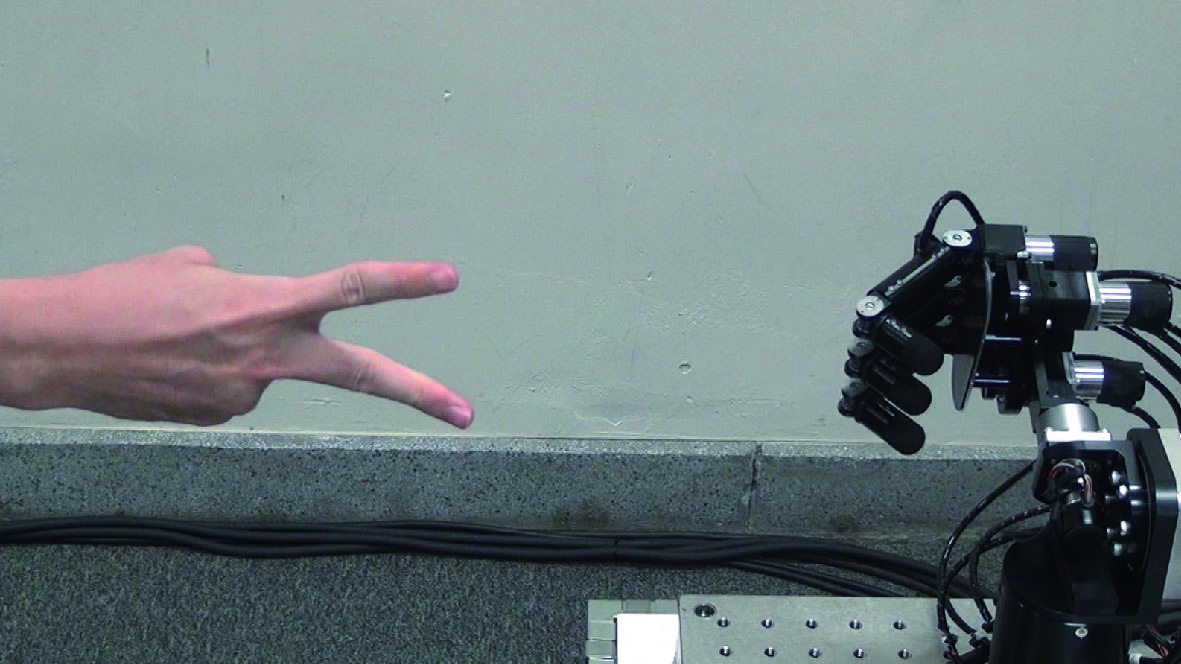
勝率100%じゃんけんロボット
© 山川 雄司
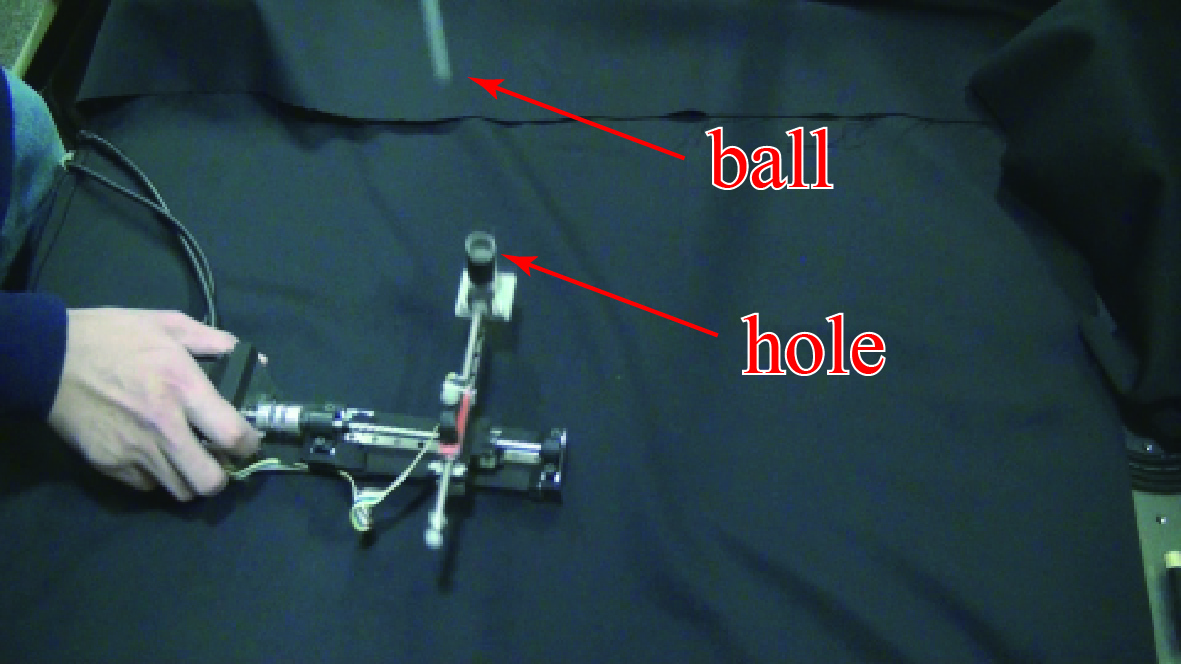
運動機能拡張
© 山川 雄司
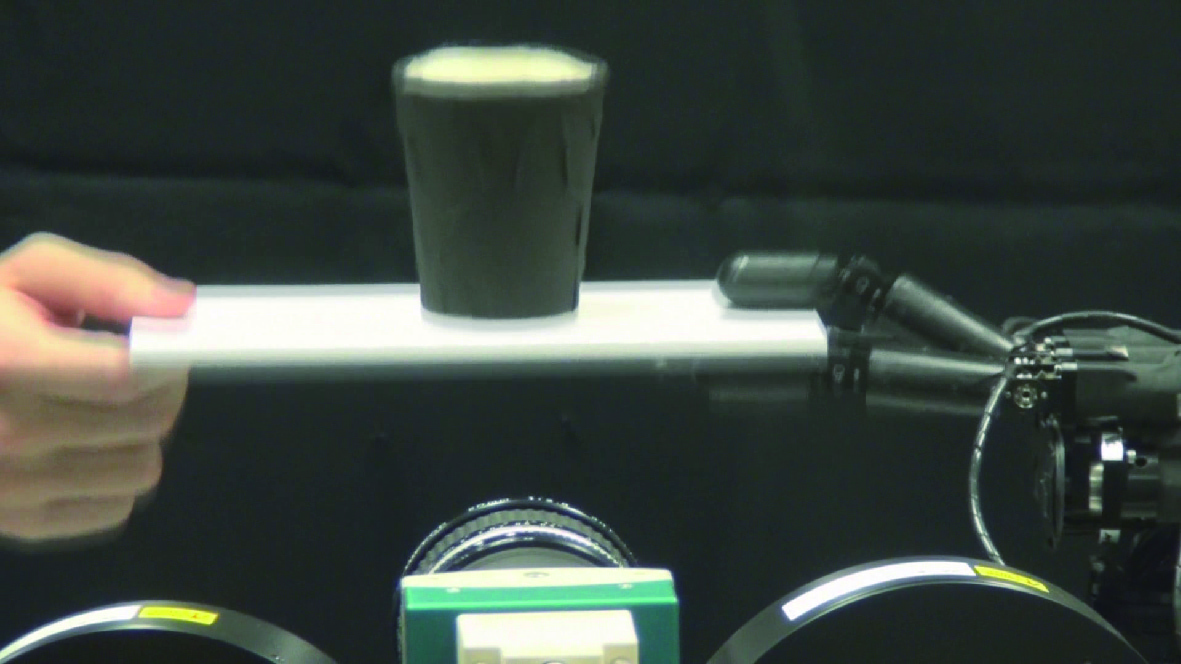
協調動作
© 山川 雄司
作業支援
© 山川 雄司
想定される応用
このような技術は、例えば、ものづくり産業、特に精密機器等の生産における熟練技術者の技の再現・継承や、効率的かつ快適な製造ライン構築などに応用可能と考えられる。
連携への希望
興味がある企業・団体からの共同研究提案を受け入れる用意がある。
関連情報
公開日 / 更新日
- 2022年01月04日
識別番号
- No. 00251-01