野崎 大地教授
大学院教育学研究科 総合教育科学専攻
SDGs











連携提案
私達人間の洗練された動作がどのような機序で制御また獲得されているのか、この研究室では、ロボットアームを用いた行動科学的実験、経頭蓋磁気刺激や脳波を用いた生理学的実験、およびモデリングなどの数理的手法を用いて明らかにすることを目的とする。
以下のような研究テーマに取り組んでいる。
・片腕運動と両腕運動の制御過程の違い
・両腕を協調させて動かすためのメカニズム
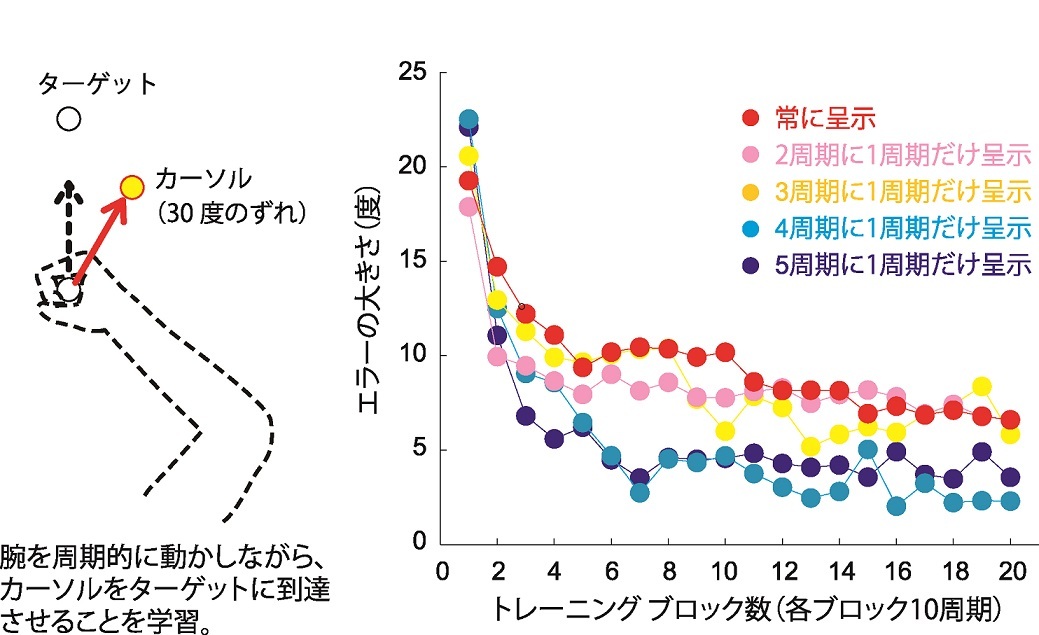
・周期運動の学習メカニズム
・運動計画が運動学習に与える影響
運動学習メカニズムの解析やそれに基づくリハビリ・トレーニング方法等に関して、企業・団体との連携が可能である。