遠隔操作ロボットのヒューマンインタフェース
山下 淳大学院新領域創成科学研究科 人間環境学専攻
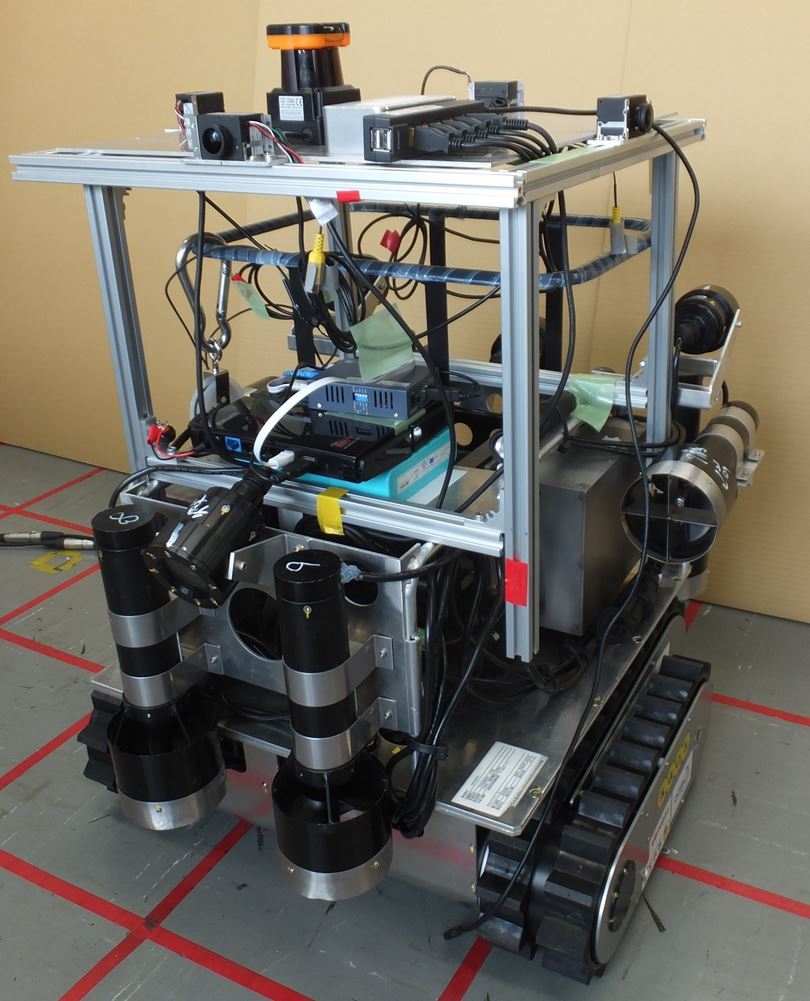
移動ロボットを遠隔操作する際、ロボットに搭載された複数のカメラの情報を効率的にオペレータに提示することが重要である。そこで当研究室では、ロボットに取り付けた複数台のカメラで映像に対してリアルタイム画像処理を施し、あたかもロボットを真上から見たような別視点映像を生成し、オペレータに提示する技術を開発した。