防災システムの革新に向けたポータブル光格子時計の開発
鳥井 寿夫大学院総合文化研究科 広域科学専攻
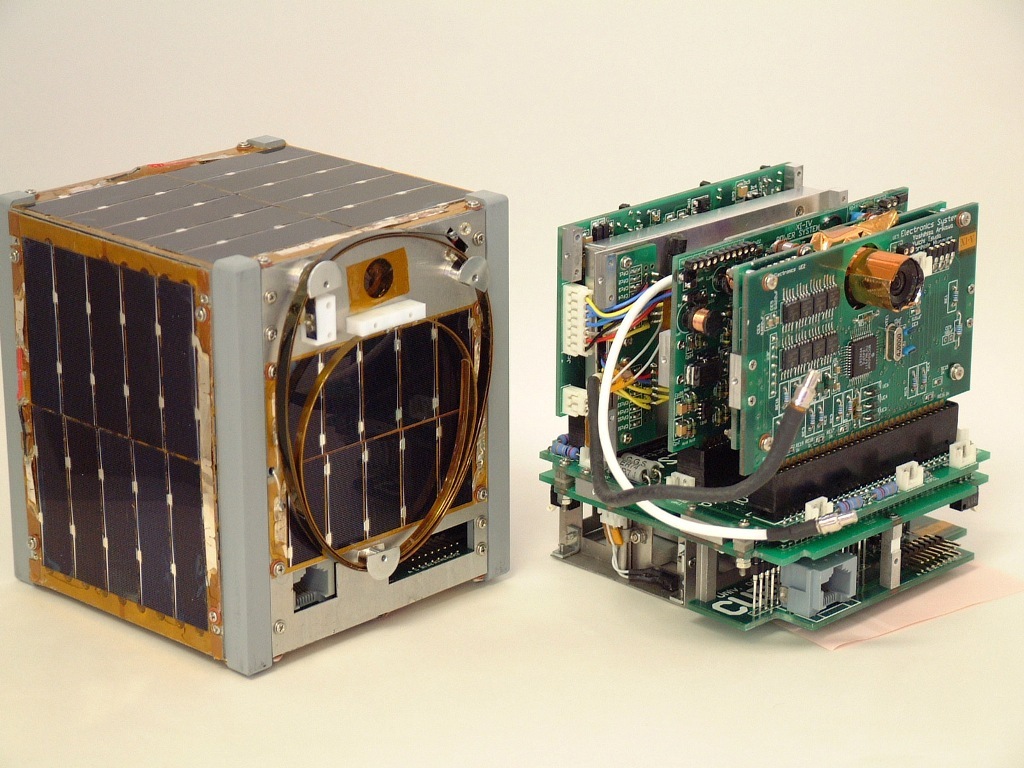
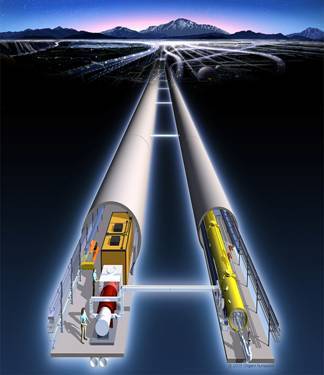
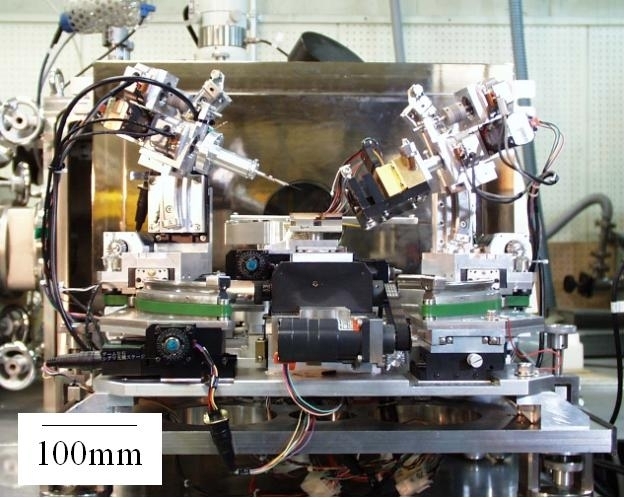
セシウム原子のマイクロ波遷移を用いる原子時計は、GPS(全地球測位システム)を支える基盤技術であり、現在の1秒の定義にも採用されている。しかしその精度は10のマイナス16乗が限界である。近年開発されたストロンチウム原子の光学遷移を用いる光格子時計の精度は10のマイナス18乗に達し、1cmの高低差に対応する一般相対論的な時間の遅れを検出できるようになった(図1)。このように重力の僅かな変化を計測できる光格子時計を利用してマグマの動きやプレートの変化などを高精度に検出すれば、火山噴火や地震発生のメカニズムに新たな知見が得られ、防災システムが革新される可能性がある。また、超高精度のカーナビによる自動運転システムなどの応用も期待できる。しかしながら、光格子時計の実験装置は大型かつ煩雑であり、複数の観測地点に配置することは現状では困難である。 この研究室は、光格子時計のポータブル化を目指しており、現在は光格子時計の前段階であるストロンチウム原子のレーザー冷却装置の小型化を進めている(図2)。ガラスセル内に生成されたストロンチウム金属膜が残留ガスを吸着するゲッター作用によって、真空ポンプなしで超高真空が得られるので、真空装置の大幅な小型化が可能であることが最近明らかになった。また、近年の青色半導体レーザーの開発によって、レーザー冷却用光源も大幅に簡素化された。最終的には、人工衛星に搭載できるサイズにまで光格子時計をポータブル化することを目指す。