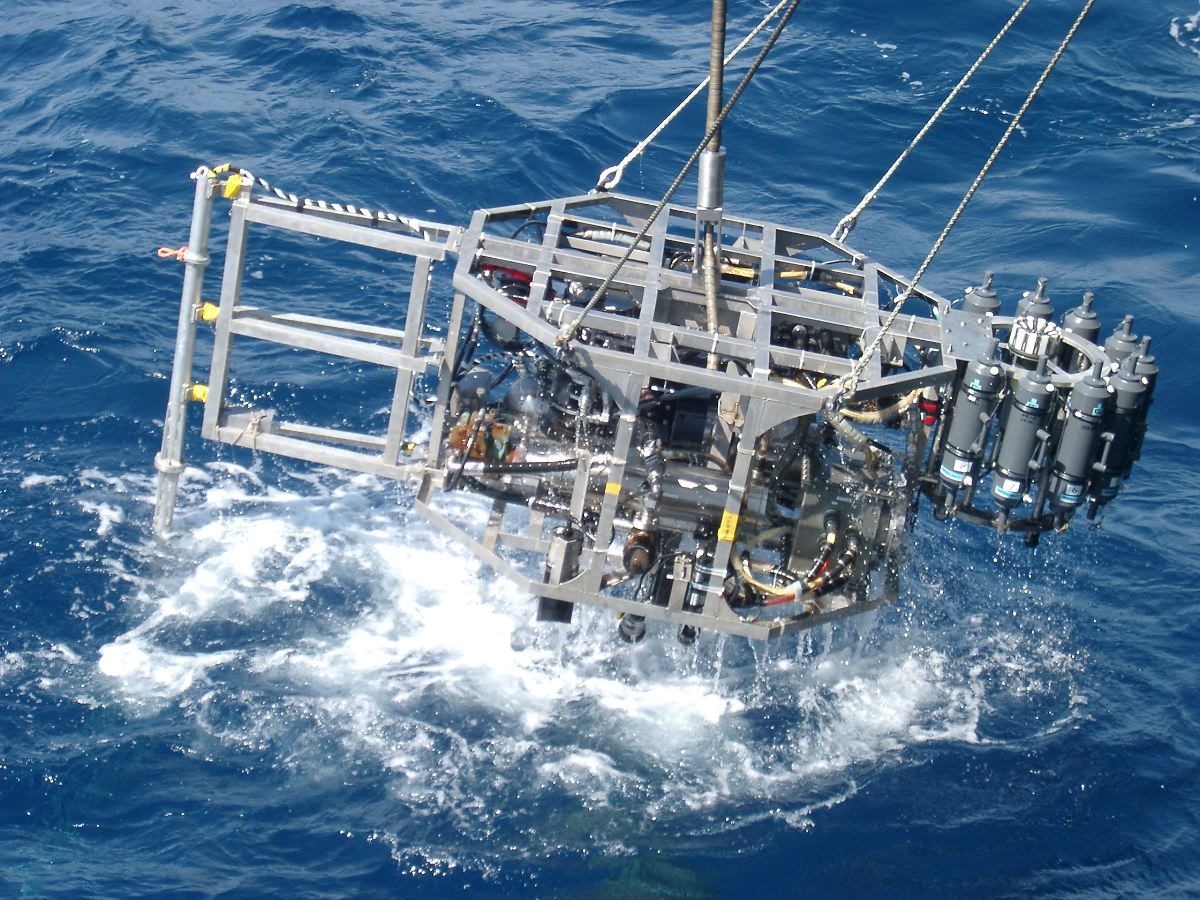
深海底サンプル採取システムの応用
芦 寿一郎大学院新領域創成科学研究科 自然環境学専攻
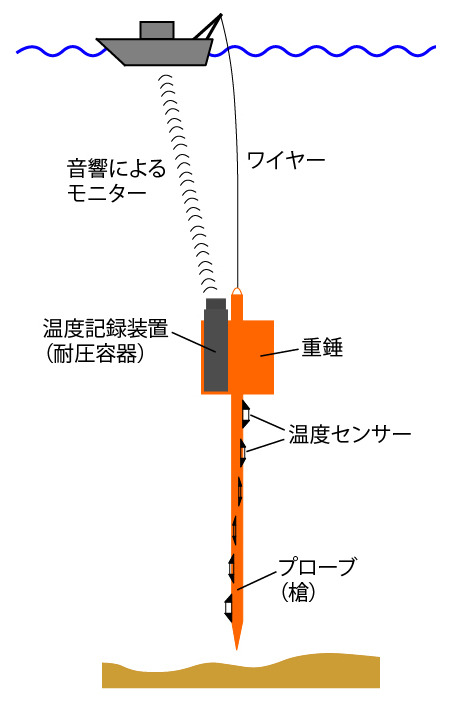
この研究室で開発した深海底サンプル採取システムは、船上からの操作により移動しながらカメラで海底を観察し、目的の地点で試料の採取を行うことができる装置である。船上から吊り下げられるパイロットビークルは4つのスラスターによる航走が可能であり、水深4000mまでの海底においてピンポイントで目的とする試料の採取ができる特長を有する。システムは可搬式であり充分な甲板スペースのある船舶に搭載可能で、数トンまでの観測・採取機器が使用できる。