ロボットの行動制御・教示の簡易化技術の共同開発
太田 順大学院工学系研究科 附属人工物工学研究センター
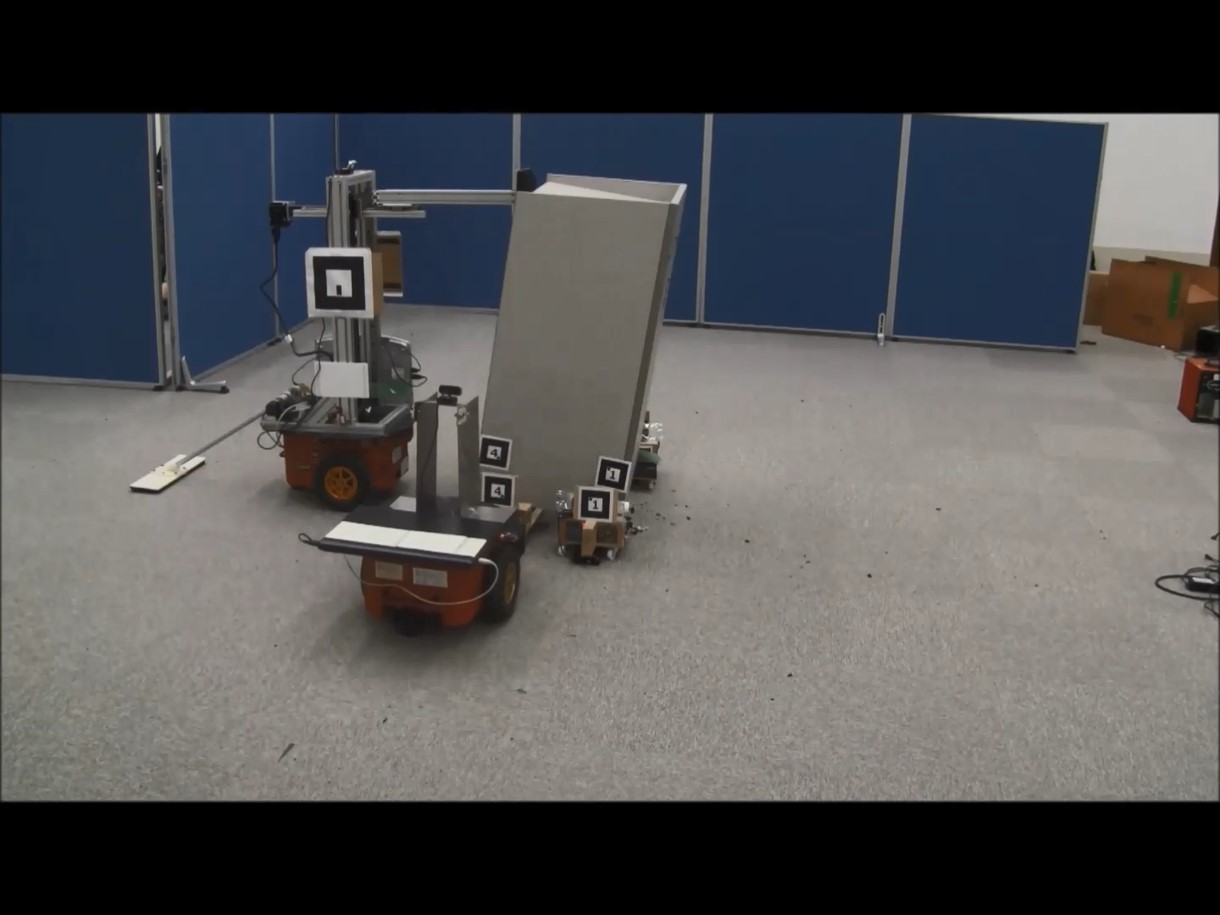
マニピュレータ・移動ロボット等各種ロボットの行動制御(機種選定,配置設計,作業手順生成,軌道生成など)を簡易に行える技術を開発して、例えば組立等の作業を行なう既存の生産ラインに各種のロボットを円滑に導入可能な設計論の構築を目指して研究を進めている。当研究室では当該分野についていくつかの研究の蓄積がなされている。